

科研成果 | 无人船自主靠泊技术
技术背景
随着无人船技术的持续进步,其在海洋观测、环境监测、搜救作业等领域的应用也日益广泛。在这些应用场景中,无人船是否能准确地停靠到指定位置成为了确保作业安全和提升作业效率的核心环节。
精准自主靠泊技术一直是无人船研究的重点,也是技术攻关的难点。无人船靠泊方法主要依赖于激光雷达SLAM(Simultaneous Localization and Mapping)技术或GPS(Global Positioning System)定位技术。激光雷达SLAM技术通过对周围环境进行扫描并构建三维地图,在此基础上进行定位和路径规划。然而,该技术在成本、精度和环境适应性方面存在一定的局限性。另一方面,虽然GPS定位技术在船舶导航中得到广泛应用,但在近岸或室内等GPS信号弱的环境中,其定位精度和可靠性会大大降低。
为了克服现有无人船自主靠泊技术中存在的成本高、精度不足、易受环境干扰等问题。广州工业智能研究院物联网技术与应用研发中心提出了一种创新性的无人船自主靠泊技术。

无人船自主靠泊示意图
无人船自主靠泊技术方案
泊位入口两侧安装了辅助定位传感器,如自主靠泊方法示意图所示,以泊位入口为基准建立坐标系,通过辅助定位传感器信息,计算出无人船相对泊位入口的位置与姿态,然后进一步得到航行前瞄目标点坐标,在目标点的引导下,最终平稳到达入口中线位置并沿着中线进入泊位内部,实现精准靠泊。
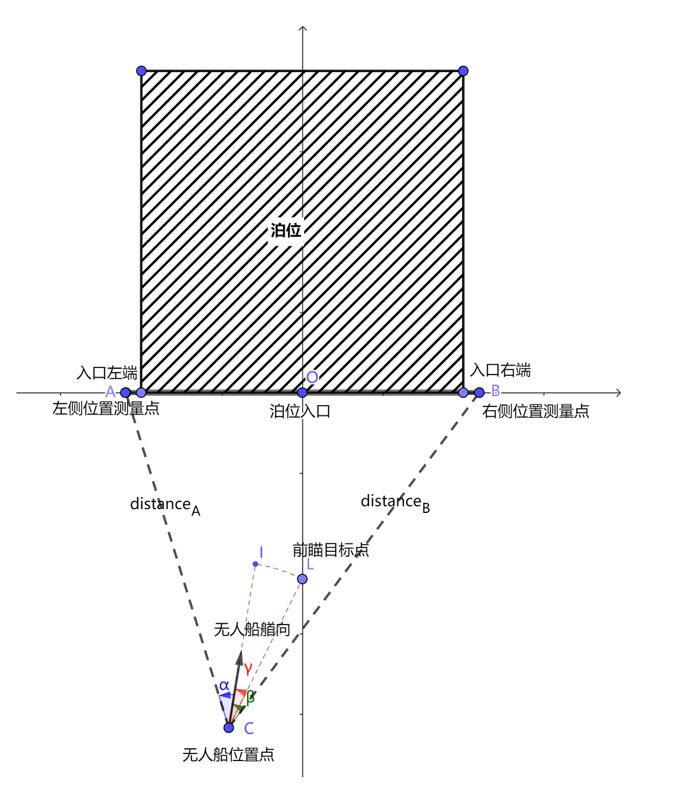
自主靠泊方法示意图
无人船自主靠泊技术优势
1. 使用低成本的测距测向传感器,实现无人船靠泊位置定位和姿态确定,降低无人船自主靠泊技术所需的软硬件成本;
2. 在靠泊装置附近不依赖卫星信号,环境适应性强,定位精度高。